Home

|
The Challenge:This year's ME218b project was to construct a fully autonomous robot that would race against two other robots, or "karts", in a head-to-head competition. Each kart had to complete three major tasks: navigating around the track, shooting at a target, and traversing an obstacle. The racetrack is an 8 ft. by 8 ft. arena with a strip of black tape surrounding the obstacle and the shooting zone (see diagram below). The target is a 5 gallon bucket placed 3 ft. away from the track with an IR beacon mounted on the part of the rim closest to the course. In order for a shot to be considered successful, the shot must be taken with the robot fully inside the indicated shooting zone. Finally, the obstacle is a see-saw with a 15 degree incline when unloaded, and a 20 degree decline when loaded. Suspended above the racetrack was a vision system that returned each kart's position and orientation when queried. The robots needed to communicate with the system via 4-wire serial peripheral interface (SPI). To be able to complete all of the required tasks, and in order to win the hearts of the spectators, Tubby the Surprisingly Large Robot was created.
|
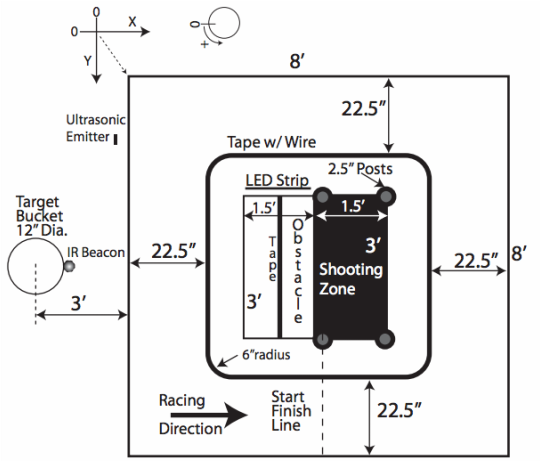
The DrEd Kart race course
Navigation
In order to navigate around the course, Tubby has three digital tape sensors located in between the drive wheels. The left and right sensors are offset slightly forward in relation to the center tape sensor. He can speed around the track reliably each time, relying only on his sensors to follow the tape and realign when needed. Additionally, Tubby uses coordinates from the DRS to know that he is in certain locations around the field, such as the shooting zone or the entrance to the obstacle, and to determine whether is he following the tape in the correct direction.
Shooting
Tubby has a vertical storage shaft capable of storing four foam balls. Adjacent to the shaft is an angled ramp that has a flywheel motor at the end. When Tubby is in the shooting zone and has aligned this ramp to the target, he uses a servo arm to kick the balls up and into the ramp, which launches the balls into the air. The launch speed can be controlled by changing the PWM control to the flywheel motor.
Obstacle
As his name might suggest, Tubby is one of the heavier robots built for this competition. He has small but high-traction wheels, which in combination with his weight, effectively use the limited torque available from the motors to drive up the ramp without slipping. He has a very low center of mass -- all three batteries and all drive-train components are located on the bottom level, and he has the minimal amount of clearance needed to enter and exit the ramp without bottoming out. This was invaluable in successfully completing the obstacle without losing his balance (tipping over on either side).
|
|
Tubby doin' his thing:
|
|
